Unpublished Scientific Drawings by Dr. Walter Russell



This is an ELECTRIC universe of motion, not a Newtonian gravitational universe. Nor is the universe an objective material universe. Objectivity is only one single moment in the life of the entire cycle. That cycle is comprised of many such moments some of which are sensed as density and materialistic while others are beyond sensing.
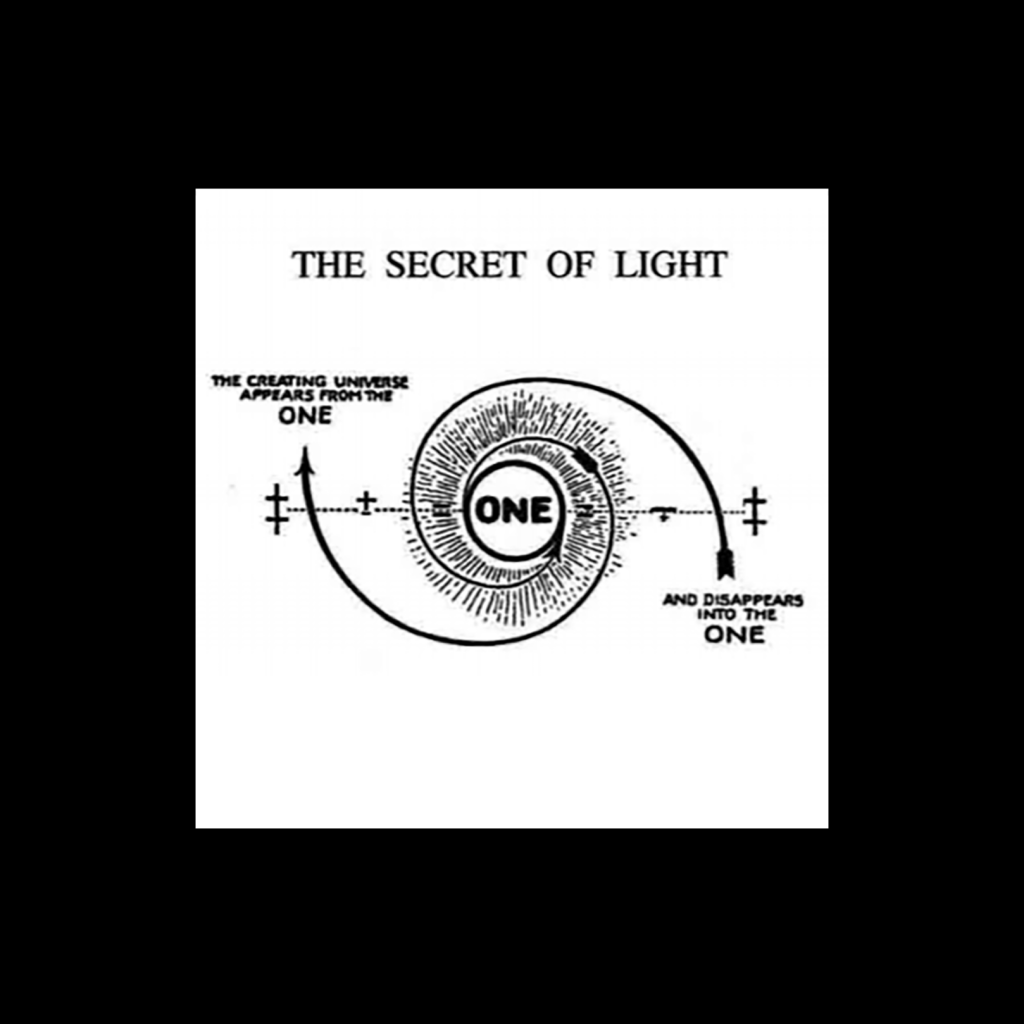

If this change in our thinking is true to Nature, there can be only one kind of elechicity–positive electricity, meaning the power to charge or compress. It necessarily and logically follows that a negative electricity would be impossible in an electrically polarized universe in which both divided mates are equal. It also would be unnecessary if the other end of the compression pump, which this universe is, is the universal vacuum. Shall we call this new thinking, or is it but changed thinking?
Shall we concede that early observers who arrived at such conclusions in the infancy of scientific research, were right, without the possibility of being mistaken? Or can we not consider them as torch bearers, rather than anchors?



![]()
![]()
Edo Kael
Dec 6 (4 days ago)
to Jim, don, Juan, David, jhafner, Buddy, Neil, Peter, frank
If I am understanding this correctly (and I might very not), then up to a certain (small) level the Magnetic forces are able to “push” alike particles i.e protons/electrons closer together.
The question fer me is if this is the same thing i tried to point out? I am inclined to see this as two different principles, One dictates by the larger on the smaller as you describe and the other one the intrinsic forces that are at play at a proton electron level. I am also inclined to believe that the smallest at first dictates the larger, although the other way around is very much there as well. Or.. are both always at play indeed….
Think we need another meet-up 🙂
Edo
On Tue, Dec 5, 2017 at 6:50 PM, Jim Weninger <jwen1@yahoo.com> wrote:
Not just electrostatics, but adding in magnetism, and we get what looks like a bizzarre mixture of long range and short range, attractive and repulsive forces.
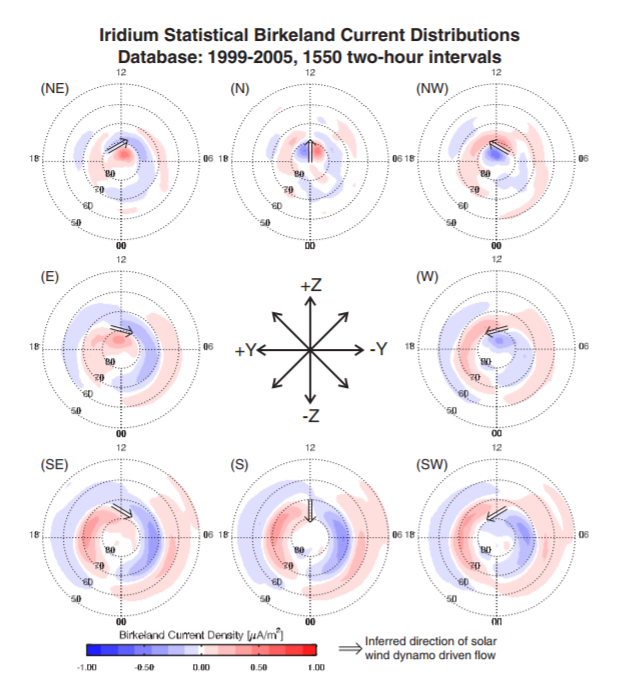
We know from Birkeland currents, that outside of a B.C., we should have electrostatic repulsion of like charged objects. Within the B.C., we have a binding of like charge, by the magnetic forces of the filament. The B.C. can sort charged matter into shells,but also force matter towards the central radius. The magnetic field of a B.C., does “turn off” at some radius, leaving us with again merely the electrostatic repulsion of like charges, now much higher because of the density of charged material forced to the center of the filament.
A mistake here, would be to forget about the filament (and resulting magnetic forces) in which the particles reside, and try to explain what we are seeing by radial forces between individual particles themselves. Notice that the effect of a B.C. is to push some charged material in to the center of the filament, but only until the radius where the magnetic field “turns off”, and we only have the electrostatic repulsion of like charges, so it appears that there is an attractive force, that suddenly become repulsive at some radius. There are no attractive forces involved ever. We have the Lorentz force pushing material in to the center, and where that turns off, only the repusive force pushing charge apart.
On Monday, December 4, 2017, 12:24:48 AM MST, Edo Kael <edwinkaal00@gmail.com> wrote:
From one of the links…..
“….THE LOW-ENERGY NUCLEAR REACTION: SOME CALL IT COLD FUSION / REGARDLESS OF THE THEORETICAL EXPLANATION, SOME SAY THERE’S BY NOW NO DOUBT THAT NUCLEAR REACTIONS CAN BE TRIGGERED USING CHEMICAL ENERGY / ALTHOUGH THESE CLAIMED…
![]()
![]()

![]()
|
5:38 PM |
|
|
|
|||
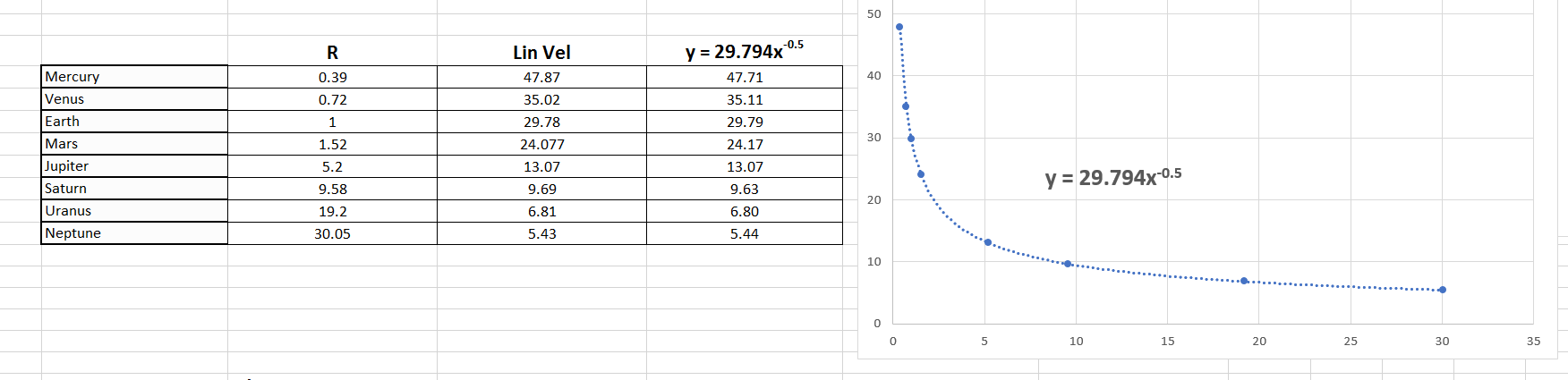
Kepler’s third law – sometimes referred to as the law of harmonies – compares the orbital period and radius of orbit of a planet to those of other planets. Unlike Kepler’s first and second laws that describe the motion characteristics of a single planet, the third law makes a comparison between the motion characteristics of different planets. The comparison being made is that the ratio of the squares of the periods to the cubes of their average distances from the sun is the same for every one of the planets. As an illustration, consider the orbital period and average distance from sun (orbital radius) for Earth and mars as given in the table below.
| Planet | Period (s) |
Average Distance (m) |
T2/R3 (s2/m3) |
| Earth | 3.156 x 107 s | 1.4957 x 1011 | 2.977 x 10-19 |
| Mars | 5.93 x 107 s | 2.278 x 1011 | 2.975 x 10-19 |
Observe that the T2/R3 ratio is the same for Earth as it is for mars. In fact, if the same T2/R3 ratio is computed for the other planets, it can be found that this ratio is nearly the same value for all the planets (see table below). Amazingly, every planet has the same T2/R3 ratio.
| Planet | Period (yr) |
Average Distance (au) |
T2/R3 (yr2/au3) |
| Mercury | 0.241 | 0.39 | 0.98 |
| Venus | .615 | 0.72 | 1.01 |
| Earth | 1.00 | 1.00 | 1.00 |
| Mars | 1.88 | 1.52 | 1.01 |
| Jupiter | 11.8 | 5.20 | 0.99 |
| Saturn | 29.5 | 9.54 | 1.00 |
| Uranus | 84.0 | 19.18 | 1.00 |
| Neptune | 165 | 30.06 | 1.00 |
| Pluto | 248 | 39.44 | 1.00 |
(NOTE: The average distance value is given in astronomical units where 1 a.u. is equal to the distance from the earth to the sun – 1.4957 x 1011 m. The orbital period is given in units of earth-years where 1 earth year is the time required for the earth to orbit the sun – 3.156 x 107 seconds. )
Kepler’s third law provides an accurate description of the period and distance for a planet’s orbits about the sun. Additionally, the same law that describes the T2/R3 ratio for the planets’ orbits about the sun also accurately describes the T2/R3 ratio for any satellite (whether a moon or a man-made satellite) about any planet. There is something much deeper to be found in this T2/R3 ratio – something that must relate to basic fundamental principles of motion. In the next part of Lesson 4, these principles will be investigated as we draw a connection between the circular motion principles discussed in Lesson 1 and the motion of a satellite.
Newton’s comparison of the acceleration of the moon to the acceleration of objects on earth allowed him to establish that the moon is held in a circular orbit by the force of gravity – a force that is inversely dependent upon the distance between the two objects’ centers. Establishing gravity as the cause of the moon’s orbit does not necessarily establish that gravity is the cause of the planet’s orbits. How then did Newton provide credible evidence that the force of gravity is meets the centripetal force requirement for the elliptical motion of planets?
Recall from earlier in Lesson 3 that Johannes Kepler proposed three laws of planetary motion. His Law of Harmonies suggested that the ratio of the period of orbit squared (T2) to the mean radius of orbit cubed (R3) is the same value k for all the planets that orbit the sun. Known data for the orbiting planets suggested the following average ratio:
Newton was able to combine the law of universal gravitation with circular motion principles to show that if the force of gravity provides the centripetal force for the planets’ nearly circular orbits, then a value of 2.97 x 10-19 s2/m3 could be predicted for the T2/R3 ratio. Here is the reasoning employed by Newton:
Consider a planet with mass Mplanet to orbit in nearly circular motion about the sun of mass MSun. The net centripetal force acting upon this orbiting planet is given by the relationship
This net centripetal force is the result of the gravitational force that attracts the planet towards the sun, and can be represented as
Since Fgrav = Fnet, the above expressions for centripetal force and gravitational force are equal. Thus,
Since the velocity of an object in nearly circular orbit can be approximated as v = (2*pi*R) / T,
Substitution of the expression for v2 into the equation above yields,
By cross-multiplication and simplification, the equation can be transformed into
The mass of the planet can then be canceled from the numerator and the denominator of the equation’s right-side, yielding
The right side of the above equation will be the same value for every planet regardless of the planet’s mass. Subsequently, it is reasonable that the T2/R3 ratio would be the same value for all planets if the force that holds the planets in their orbits is the force of gravity. Newton’s universal law of gravitation predicts results that were consistent with known planetary data and provided a theoretical explanation for Kepler’s Law of Harmonies.

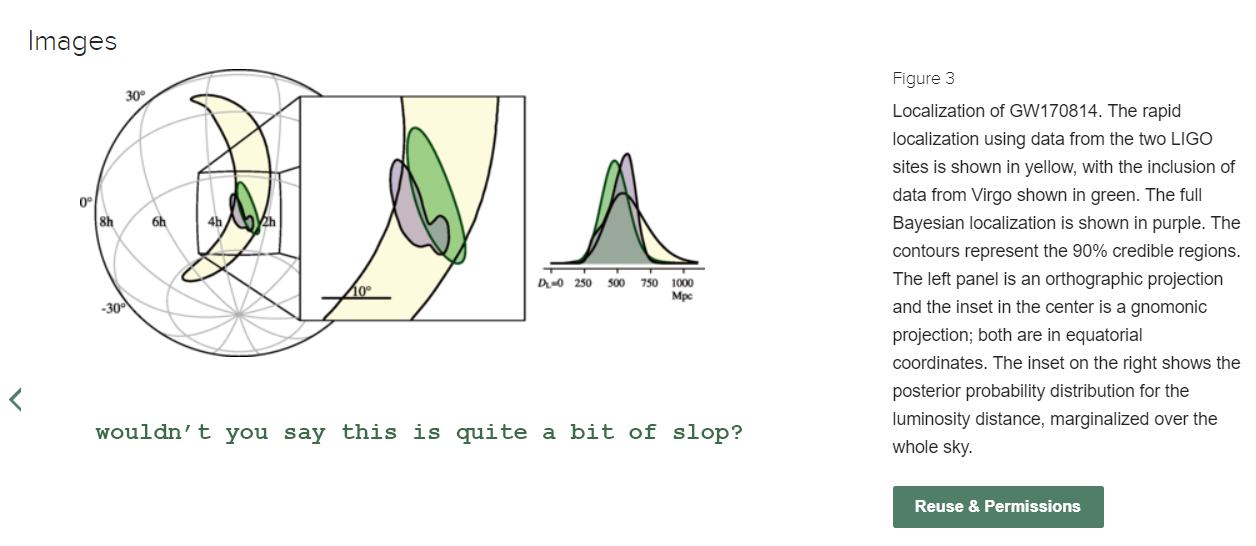
![]()
https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.119.141101
https://www.space.com/25088-gravitational-waves.html
What are the Assumptions?

|
8:05 PM |
|
||
|
||||
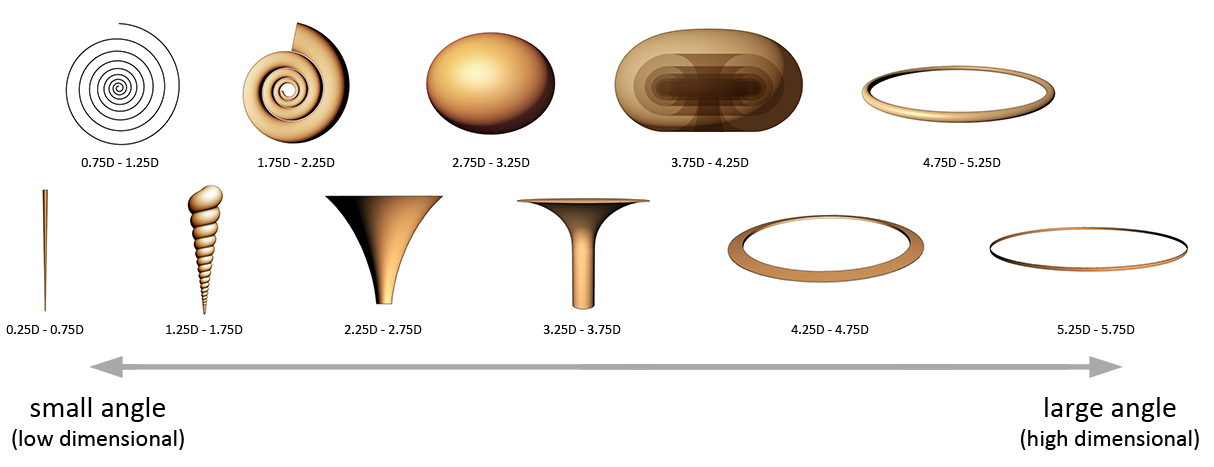
And we’ve still not addressed what we can learn from the solar system scale. On the atomic/ nuclear scale, it’s easy to fall into the trap of “particles in a vacuum”. On the solar system scale, we now have the Bessel function idea where there are “orbital energy levels”, where we can theoretically have jumps from one stable orbit to another, but ALSO actual changes in the Bessel function orbits themselves.
Sent from my iPhone
> On Dec 4, 2017, at 11:52 AM, jhafner <jhafner@swcp.com> wrote:
>
> Hi Edwin and all,
>
> I was nodding my head as I read this – Edwin’s model and Mills are in sync. Juan, thanks for all the great references.
>
> “It’s commonly accepted that hydrogen’s solo electron is whizzing around its nucleus in its most energetically favorable, ground-state atomic orbital — you simply can’t bring hydrogen’s electron closer to its nucleus. But Mills says you can.”
>
> https://plus.google.com/+
>
> Edwin wrote:
>> The key here IMHO is that the electron can go closer to the
>> proton….. This has everything to do with the creation of the so
>> called “neutrons” and as i propose they are not fundamental particles
>> but an electron (tightly) fitted between 2 protons. That is the state
>> whereby the electron moved from orbit position to nuclear (neutron)
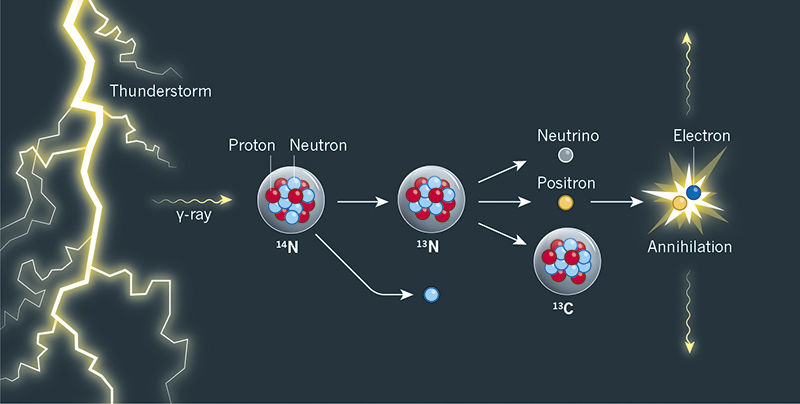
>> position. This is Beta + decay! so it is a known thing.
>> On that note, we then have to accept the fact that an electron
>> falling into a lower state is only possible when that electron
>> releases energy (just like normal light emission), meaning it is a
>> condensing effect in essence. Or at least contracting… Soooo by
>> creating a very hot plasma one does not readily get fusion going,
>> hence it might prove quite difficult for hot fusion to really be.
>> “cold fusion” however uses an extremely strong force at small level,
>> namely the electrostatic i would argue / electricity (EM)
>>
>> Edo
> …
>
> /Jean
|
11:24 PM |
|
||
|
||||
From one of the links…..
“….THE LOW-ENERGY NUCLEAR REACTION: SOME CALL IT COLD FUSION / REGARDLESS OF THE THEORETICAL EXPLANATION, SOME SAY THERE’S BY NOW NO DOUBT THAT NUCLEAR REACTIONS CAN BE TRIGGERED USING CHEMICAL ENERGY / ALTHOUGH THESE CLAIMED
REACTIONS ARE NOT YET WELL UNDERSTOOD, A CANDIDATE HYPOTHESIS IS THAT THE ELECTRON IN HYDROGEN COULD TRANSITION FROM ITS NORMAL GROUND ENERGY STATE TO PREVIOUSLY UNKNOWN LOWER AND MORE STABLE STATES, LIBERATING ENERGY IN THE PROCESS / “TELLING PHYSICISTS THAT THEY’VE GOT [HYDROGEN’S GROUND STATE] WRONG IS LIKE TELLING MOTHERS ACROSS AMERICA THAT THEY’VE MISUNDERSTOOD APPLE PIE”
I ain’t gonna tell no mother she misunderstood apple pie….
On Sat, Dec 2, 2017 at 8:53 PM, don mitchell <don86326@gmail.com> wrote:
Thanks, Juan. Good stuff. Looking forward to a deeper look.-donOn Sat, Dec 2, 2017 at 11:42 AM, Juan Calsiano <juancalsiano@gmail.com> wrote:
Hi Don (and all),
If you are diving into the subject of LENR (the N usually standing for “nuclear”), make sure you get Steven Krivit’s three-book series.
Krivit was an editor for the American Chemical Society 2008 and 2009 technical reference books on LENRs and editor-in-chief for the 2011 Wiley Nuclear Energy Encyclopedia. He is the leading author of review articles and encyclopedia chapters about LENRs, including invited papers for the Royal Society of Chemistry, Elsevier and John Wiley & Sons.
Considering the controversial nature of the subject and the dogmatic attitude of academia as a whole, it is a pleasing surprise to see that he could publish books with titles like “Hacking the Atom”, “Fusion Fiasco” and “Lost History” and still be considered an authoritative voice within conventional circles.
Here are the links (each kindle ebook is just 4 bucks):
Of course, LENR is one of the many subjects that will be addressed in Chris Reeve’s incoming Controversies of Science social network. His preliminary controversy card about LENR can be found here (you may also want to check out my comments there regarding a possible relationship between LENR and cavitation phenomena):
https://plus.google.com/+Chris
ReeveOnlineScientificDiscourse IsBroken/posts/ZZXJMQyGqB1 That card will end up being a part of the website, and here is a preview of that:Happy explorations!
Juan
On 2 December 2017 at 14:56, don mitchell <don86326@gmail.com> wrote:
Lady and Gents,About Low Energy Neutron Reaction (LENR)An impressive index of the slides linked above is on slides #4 and #5.This topic is about elemental transmutation.Frank Znidarsic’s data for his theory in ‘Control of the Natural Forces’ came from a cold fusion (LENR) experiment’s frequency data, plus Podkletnov’s gravity beam frequency data (duplicated by Dr. Li in NASA’s Alabama facility), wherein Znidarsic realizes there is a resonant frequency of a nucleus that is caused by a delay of nuclear (Coulomb field) response –which delay IS conjectured to be the root-cause of the infamous fine grain constant (Planck’s constant). In this line of thought, transmutation occurs during resonance with nuclei driven with electrical or magnetic activation (Podkletov) OR sonic activation driven by EM (LENR) as in cold fusion experiments. The key is to create a spatial-resonance of the nucleus, vibrating in space, of a sufficient population of atoms.The magic frequency realized by Mr. Z. is 1.094 megaHz-meters. (I.e., a one meter circumference conductor would magnetically cohere with nuclei at 1.094 megaHz.Frank Znidarsic <fznidarsic@aol.com> is a really nice guy, though Frank couldn’t follow my home-made vernacular in magnetic resonance of a rotating field (around the axial symmetry of a torus knot array).Some notes/links on Frank Znidarsic: http://portal.groupkos.com/index.php?title=Frank_Znidarsic Videos/links on Eugene (Evgeny) Podkletnov: http://portal.groupkos.com/index.php?title=Euge ne_Podkletnov_portal -don in Colorado
 ——————————–
——————————–

https://youtu.be/oJcZyitiwrw

|
|
|
||
|
||||
In his answer, he said: “we have to choose what alpha will be. If we can find a reasonable function of r for it, that’s good.” In his paper, he says: “The step-wise Euler method described here can also be used in the event the state-equations are nonlinear due to choosing an arbitrary α = α (r).”
Also, in his paper he says: “Allowing α = α(r) would distort the radial axis used to plot Bz(r) and Bθ(r)”
That is related to what you want. So, if you choose the adequate α = α(r), then yes, the current density j may fall off more strongly with r (which is not the same as saying that alpha is a function of j). Even more, with the adequate α = α(r) you may get a more convincing argument for the Titius Bode observation to replace the one made by Don in 2015, in which he used a constant alpha of 19.5, seemingly leaving lots of unused possible orbits between real orbits.
Cheers,
On 2 December 2017 at 02:04, Jim Weninger <jwen1@yahoo.com> wro
Juan and David,Read especially section 3 and the derivation of equation (14):then tell me where Don or I made a mistake. Alpha does to me seem to be a function of j, and then would be the key to fitting the Bessel function to the solar system. I’m always willing to accept that I’ve made an error, but here I don’t even understand the objection. Perhaps Either of you can help?—– Forwarded Message —–From: Donald Scott <dascott3@cox.net>To: Jim Weninger <jwen1@yahoo.com>Sent: Friday, December 1, 2017, 12:15:10 PM MSTSubject: Re: If alpha is function of j, does it not fall off as j decrease?Alpha is not a function of j.
Alpha is a scale factor between the dimensionless independent Bessel function variable, x, and the real-world variable, r.An Example: The first zero of Bessel function of J0(x) is at x = 2.4048. That’s the radius where the central lobe of j and B ends – where the z component stops and the encircling wrap-around component is maximum. It’s where the “first orbit” is. So, if we want to use “astronomical units” (Earth-Sun distance) as our real-world radius unit, the orbit of Mercury is at about r = 0.3. That means: alpha = x/r = 2.4048 / 0.3 = 8.016. That is a constant, not a variable that depends on r or j or anything else. The next realistic orbit would (IMO) be at x = 8.6537, or r = 8.6537/ 8.016 ~ 1. (I don’t know what happened to Venus??)The point is, we have to choose what alpha will be. If we can find a reasonable function of r for it, that’s good.Feel free to disagree, but I want to make sure you understand where I am coming from on this.Don
|
|
|
||
|
|||
This keeps ringing for me – The spatial frequency of the bessel function as a function of r:

On Fri, Dec 1, 2017 at 9:34 PM, Juan Calsiano <juancalsiano@gmail.c
On 2 December 2017 at 02:04, Jim Weninger <jwen1@yahoo.com> wro
Alpha is not a function of j.
On Dec 1, 2017, at 9:50 AM, Donald Scott <dascott3@cox.net> wrote:
Jim,
Here are my reactions to your last email.
D
<ForJim2.docx>
Platonic solids/The Structure Atom Model (SAM) by Edwin Kaal from Science to Sage on Vimeo.
![]()

![]()
On Sat, Dec 2, 2017 at 10:14 AM, don mitchell <don86326@gmail.com> wrote:
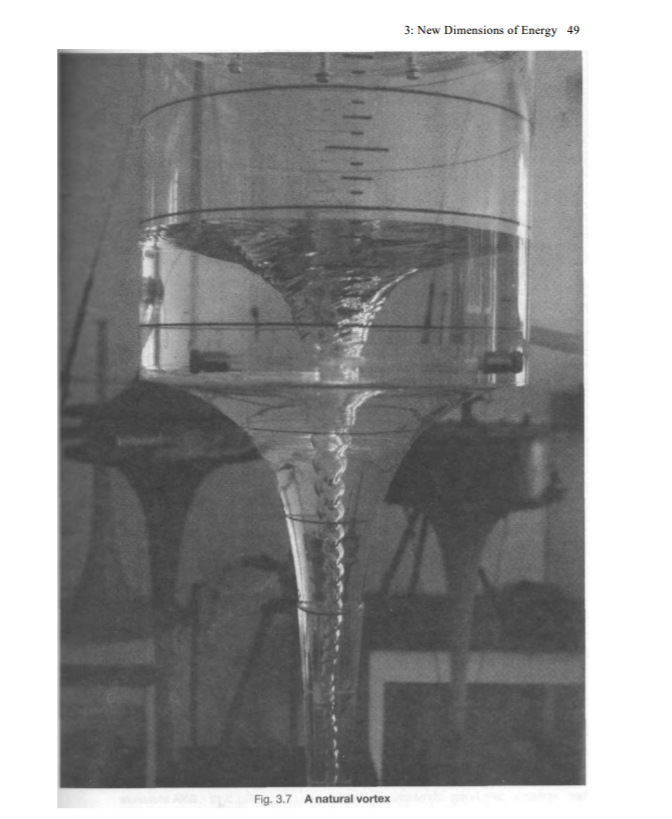
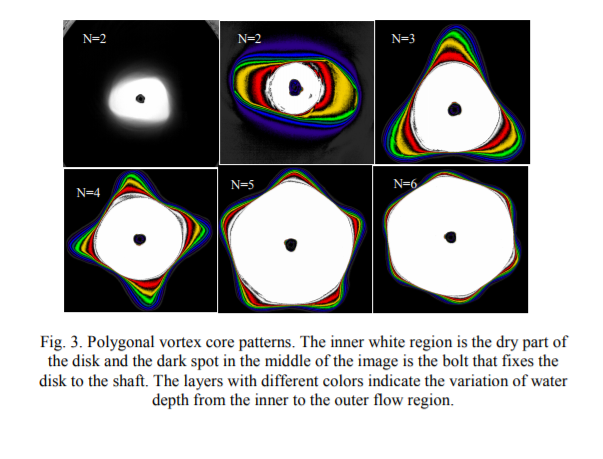
Found a link to polygons in spinning fluids…Symmetry-Breaking of Interfacial Polygonal Patterns and Synchronization of Travelling Waves within a Hollow-Core Vortex-don
On Sat, Dec 2, 2017 at 10:14 AM, don mitchell <don86326@gmail.com> wrote:
Found a link to polygons in spinning fluids…Symmetry-Breaking of Interfacial Polygonal Patterns and Synchronization of Travelling Waves within a Hollow-Core Vortex
|
10:42 AM |
|
||
|
||||
Hi Don (and all),
If you are diving into the subject of LENR (the N usually standing for “nuclear”), make sure you get Steven Krivit’s three-book series.
Krivit was an editor for the American Chemical Society 2008 and 2009 technical reference books on LENRs and editor-in-chief for the 2011 Wiley Nuclear Energy Encyclopedia. He is the leading author of review articles and encyclopedia chapters about LENRs, including invited papers for the Royal Society of Chemistry, Elsevier and John Wiley & Sons.
Considering the controversial nature of the subject and the dogmatic attitude of academia as a whole, it is a pleasing surprise to see that he could publish books with titles like “Hacking the Atom”, “Fusion Fiasco” and “Lost History” and still be considered an authoritative voice within conventional circles.
Here are the links (each kindle ebook is just 4 bucks):
Of course, LENR is one of the many subjects that will be addressed in Chris Reeve’s incoming Controversies of Science social network. His preliminary controversy card about LENR can be found here (you may also want to check out my comments there regarding a possible relationship between LENR and cavitation phenomena):
https://plus.google.com/+
Happy explorations!
Juan
On 2 December 2017 at 14:56, don mitchell <don86326@gmail.com> wrote:
Lady and Gents,About Low Energy Neutron Reaction (LENR)An impressive index of the slides linked above is on slides #4 and #5.This topic is about elemental transmutation.Frank Znidarsic’s data for his theory in ‘Control of the Natural Forces’ came from a cold fusion (LENR) experiment’s frequency data, plus Podkletnov’s gravity beam frequency data (duplicated by Dr. Li in NASA’s Alabama facility), wherein Znidarsic realizes there is a resonant frequency of a nucleus that is caused by a delay of nuclear (Coulomb field) response –which delay IS conjectured to be the root-cause of the infamous fine grain constant (Planck’s constant). In this line of thought, transmutation occurs during resonance with nuclei driven with electrical or magnetic activation (Podkletov) OR sonic activation driven by EM (LENR) as in cold fusion experiments. The key is to create a spatial-resonance of the nucleus, vibrating in space, of a sufficient population of atoms.The magic frequency realized by Mr. Z. is 1.094 megaHz-meters. (I.e., a one meter circumference conductor would magnetically cohere with nuclei at 1.094 megaHz.Frank Znidarsic <fznidarsic@aol.com> is a really nice guy, though Frank couldn’t follow my home-made vernacular in magnetic resonance of a rotating field (around the axial symmetry of a torus knot array).Some notes/links on Frank Znidarsic: http://portal.groupkos.com/index.php?title=Frank_Znidarsic Videos/links on Eugene (Evgeny) Podkletnov: http://portal.groupkos.com/index.php?title=Euge ne_Podkletnov_portal -don in Colorado
![]()
https://youtu.be/BIVNvyOCs2Y
![]()
![]()
http://32youtube.com/search.php?q=david+hudson+ormus

![]()

https://rationalwiki.org/wiki/ORMUS
http://www.subtleenergies.com/ormus/presentations/virginiabeach.htm
![]()
![]()
![]()
![]()
Hey guys,
at:Netherlands 7:00 pmUTC-3 3:00pmEST: 1:00pmMST: 11:00amPST 10:00am
/dj![]()
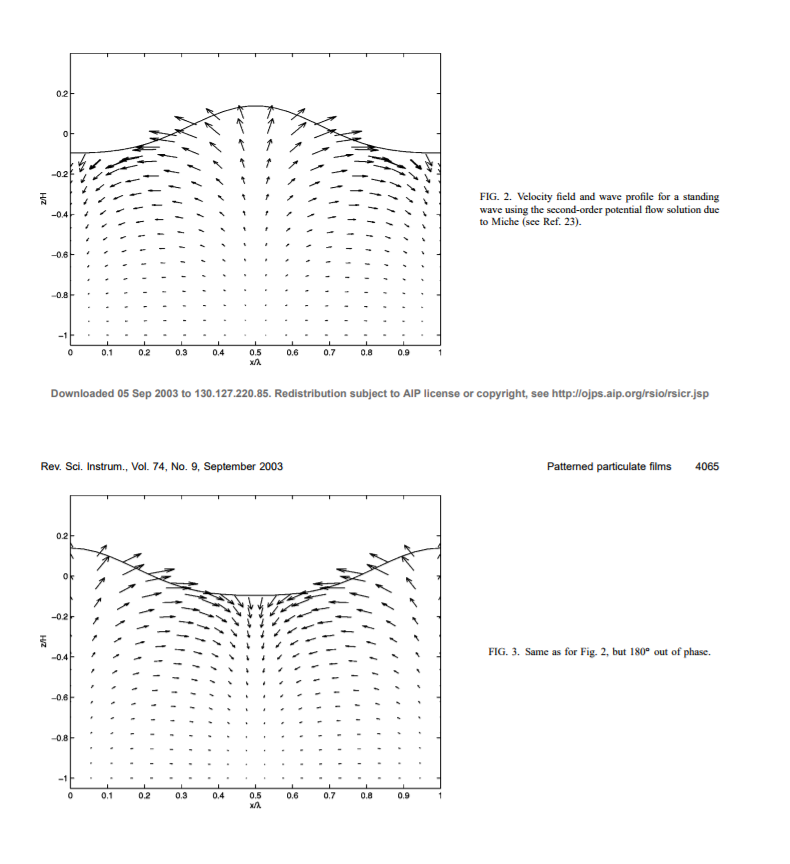
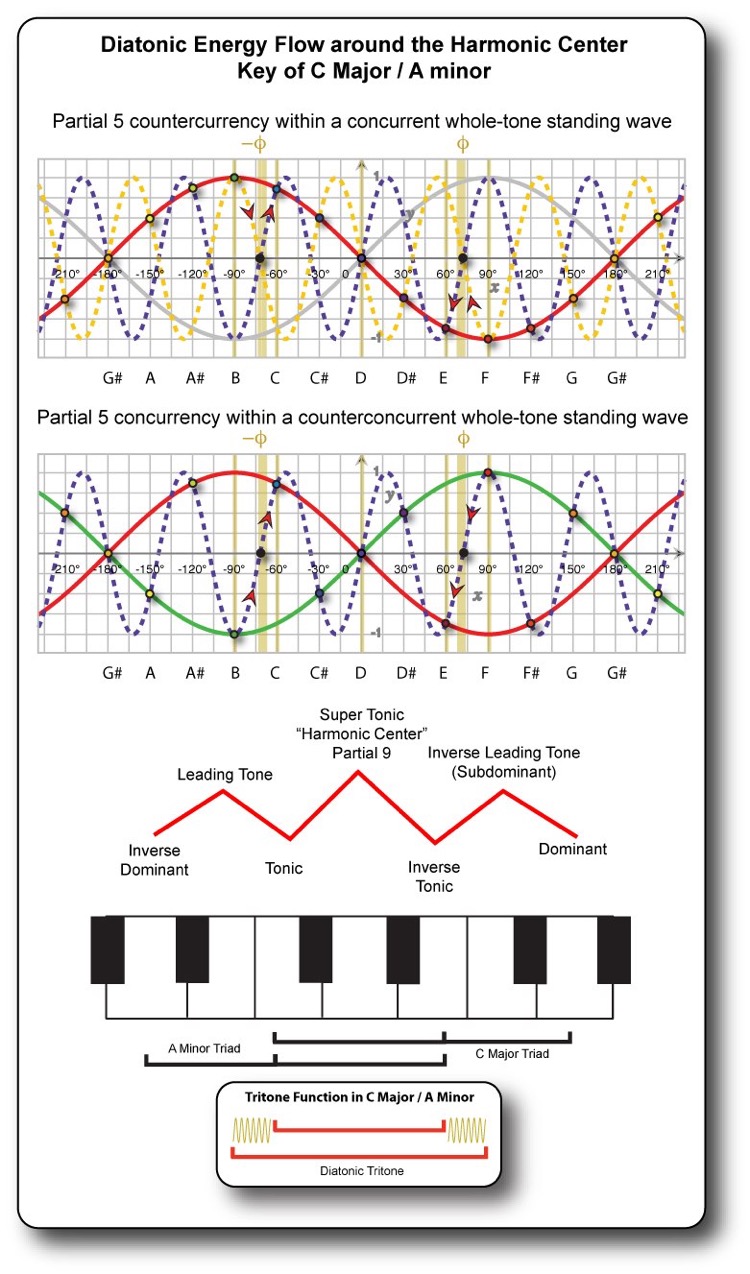
As a standing wave forms, additional waves can form in the same medium. These waves are called ‘harmonics,’ ‘wave partials’ or in music ‘overtones.’ Harmonic partials to the standing wave are not random frequencies, but instead whole number multiples (1x, 2x, 3x, … nx) of the prime resonant frequency. This is called the harmonic series.

This is what the harmonic series looks like when both opposing phases of interference are superimposed at a constant energy level or amplitude. Notice the stable pattern it creates and the gaps that form around the nodes and other locations. This is universal to all kinds of waves as they ‘resonate’ inside some container.
Question is, what causes standing waves to form in such a regular pattern? What is the underlying physics that prevents fractional or enharmonic waves from forming on the prime resonant frequency?
![]()
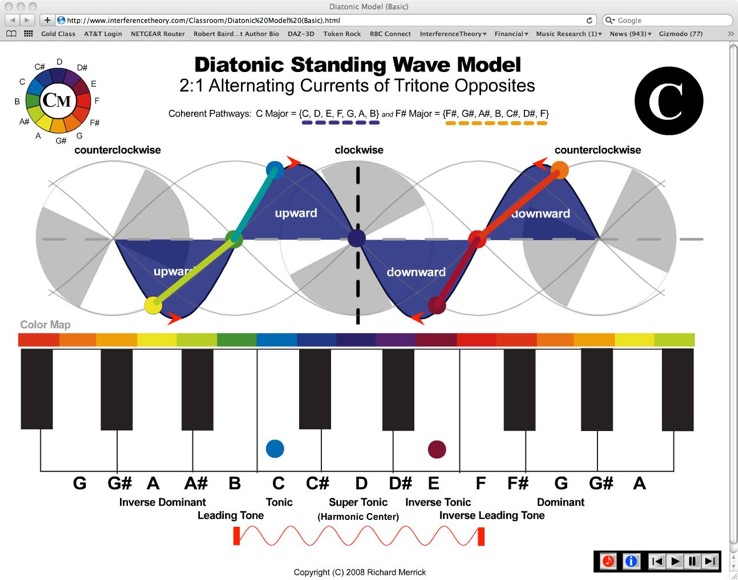
According to harmonic interference theory, the 7-tone diatonic scale of common practice music can be represented as a frequency doubling (first harmonic) of a 12-tone octave standing wave. Both are centered on the ninth harmonic partial (e.g., D in the key of C), which acts as a harmonic center for the oscillating spring effect known as the Tritone Function.
Pulling and pushing between the diatonic tritone (e.g., B,F) and major third (e.g., C,E) in diatonic scales, the Tritone Function is the central physical and physiological engine behind melodic and chordal progression; consonance and dissonance; and tension and resolution. It is recognized naturally by the human auditory system – not taught through cultural conditioning as many cognitive scientists believe. This recognition of standing wave oscillation and energy flow/ exchange transcends any scale, tuning, or temperament, though the equal octave division by twelve offers the greatest contrast for recognition (not concordance) of standing wave oscillation.
https://youtu.be/B7S0iIelToY
![]()

|
|
|
||
|
|||
Greetings All,
We have two meetups scheduled this week


|
|
|
||
|
|||
Greetings All,
We have two meetups scheduled this week