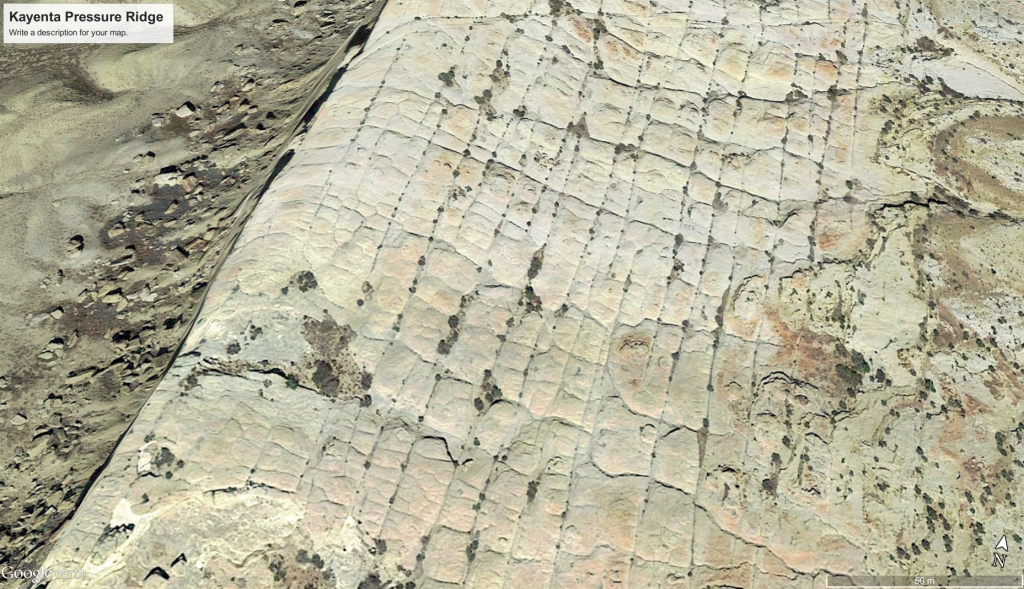
Andrew Hall – Sputtering Canyons Part 3


![]()
For more than 7 years RenderHeads has specialized in developing beautiful, bespoke interactive software. Our work can be seen in permanent museum installations as well as trade shows, storefronts and product launches all over the world. Recently, we have grown to have offices both in the United Kingdom and South Africa.
https://youtu.be/-qRPQVAjGSg
Director (SA) With a background in animation and visual effects, Shane started out as a technical artist with a passion for all things that cross the divide between the creative and technical. This passion led him to head up the South African Branch of RenderHeads. In his spare time he likes to play around with up-and-coming technology, like webGL.
Co-Founder & Director (UK) With a degree in Computer Science and programming experience in the games industry, Nathan has a sharp eye for detail and a keen instinct for what will look and feel right. It is his personal mission to make all systems, procedures and workflows as simple and efficient as possible. Despite being a self-confessed geek, due to Nathan’s easy going and sociable nature you wouldn’t know it if you met him on the street.
Co-Founder & Director (UK) Andrew started his passion for real-time graphics programming way back on the Commodore 64. He continued through to the PC where he spent many years as a professional games programmer, specialising in gameplay, tools, special effects, animation and 3D engine development. Andrew has a love of digital arts and is a proud and active member of the demo scene.

Neil is an Electrical Engineering Technologist and Electric Universe Theorist from New Brunswick, Canada. He has worked with the Electric Universe Paradigm for over a dozen years. A Scholar at EU2015 accepted for writing his paper “As History has Shown” which was a primer for EU enthusiasts. he followed it up by volunteering for EU2016 and writing a second paper “The Internal Constitution of Planets” challenging Eddington’s planetary and stellar formation models where he hosted an EU Creative Arts Workshop. This was the year of the Michael Steinbacher Memorial Geology Tour which he was a tour guide for.
At EU2017 he volunteered again and presented “Fire From the Skies” a look at the nature of planetary capacitance and how it affects incoming meteors. After that he went on several geology tours with Andy Hall, Peter Mungo Jupp, Andrew Fitts, Robert Hawthorne and Bruce Leybourne exploring many hidden geologic gems of the American South West.
A Volunteer for the Thunderbolts Project and moderator of a dozen or so EU groups he was encouraged to start a podcast with his newfound friends here.

Robert lives in Salt Lake City, Utah. He and his father, Robert Sr. , exhibited at EU 2017. They attribute electrical discharge between planets in a younger solar system as the primary mechanism causing craters on the moon and the other planets, including the Earth.
At the advice of a scientist from Brigham Young University, Hawthorne was guided to Dr. Eugene Shoemaker, co-discoverer of comet, Shoemaker-Levy 9, which famously affected Jupiter in 1994. Shoemaker’s curiosity was peaked so he visited Hawthorne and took a field trip to the unique stone. Shoemaker said that, “Upheaval Dome is the best example of a deep impact crater on the face the Earth” (1996). Sadly, Dr. Shoemaker died in car accident later that year.
Curiosity continues.

Heather Stargazer is an author, artist, and Galaxy Class Stargazer who hales from somewhere near the 42nd parallel. Her work is the product of the inspirational spaces within which we all reside. Working with several dedicated members and organizations of the Electric Universe community, she has invited us to explore these new realms of electromagnetic possibilities and connect to a whole new understanding of what has come before us and where we are going in the future.
There are currents that flow between all facets of Science, History, Nature, and Humanity. These currents are the key to unlocking the next level of our collective understanding. Please join us on this journey as we wake up in real time to the Electric Universe.
Who knows what we’ll know tomorrow?
Edo has studied fundamental and environmental chemistry most of his life. After working in the IT sector for 10 years, he began an independent research effort. His journey of discovery led him to revise the atomic structure. He has always had a passion for the expressions in nature and a fascination for science whereby the elements have always been of special interest and attraction. At the EU2016 conference, Edo presented his re-envisioned atomic structure for the first time in the Breakout Room and at the EU2017 conference he presented SAM at the main-stage. Currently, his attention goes towards further developing SAM and the study of transmutations using the model. He and James Sorensen created Ethereal Matters, LLC, a foundation for fundamental research.
Edo resides in the Netherlands.
Richard studied math, science, and programming at Stanford, and graduated with a B.S. in math ‘with distinction’. He Spent 30 years in the Silicon Valley software industry, working for leading-edge companies, Xerox Parc, Apple Advanced Technology, and many others, including a startup of my own, which developed the first user-friendly email app for the PC, c. 1985, in pre-Internet days
It occurred to him that the climate record resembles an audio signal, like you might see displayed when listening to a music podcast. In the Electric Universe model stars and planets are connected by electric currents, conducted through the plasma that pervades space. These observations led him to the hypothesis that climate change is an electrical phenomenon. He presented that hypothesis at an annual conference of the Thunderbolts Project, the organization that brings together the researchers who are pursuing the Electric Universe model.
This brings us up to the current moment.

Buddy proposes a model of dynamics in space and time eponymously named The Dougherty Set which incorporates the Golden Ratio into a system that describes universal motion with scalar recursion. The recognition of congruence between Birkeland Currents and TDS inspired him to focus his studies on the works of EU Luminaries.
He exhibited his work on The Dougherty set at EU 2017. Buddy is currently formalizing his work on TDS, He creates Lichtenberg figures in multiple mediums especially on wood.
Buddy hosts the Sunday version of the Electric View which he occasionally decides to attend.
Rumor has it he designs at Norad and exists as a real life super-hero.

David is an electrical and computer engineer who’s interest in the Electric Universe began after reading Paul A. LaViolette’s “Beyond the Big Bang”.
Between 2007 and 2015 he served as Director of Software Engineering for the medical device company Magnetecs.
He currently creates educational and exploratory simulations in VR and demonstrates a variety plasma models using SMP on the HTC Vive.
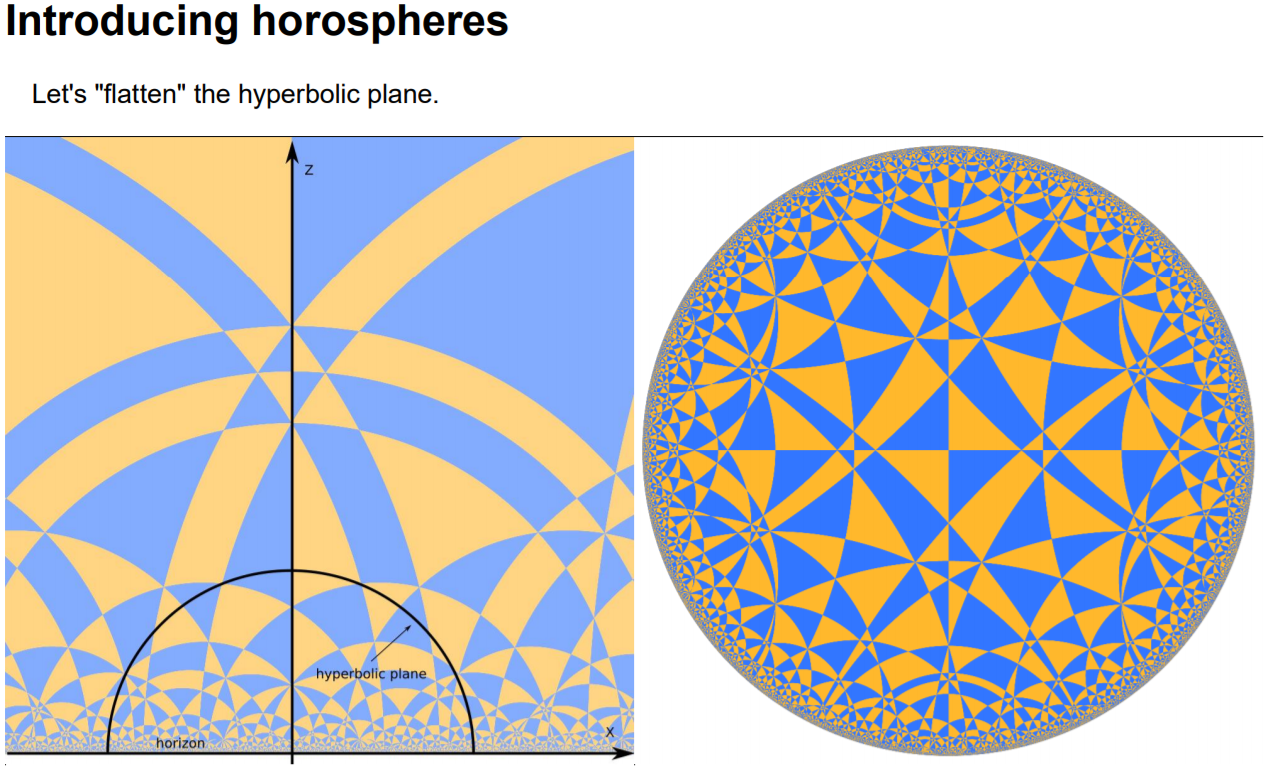
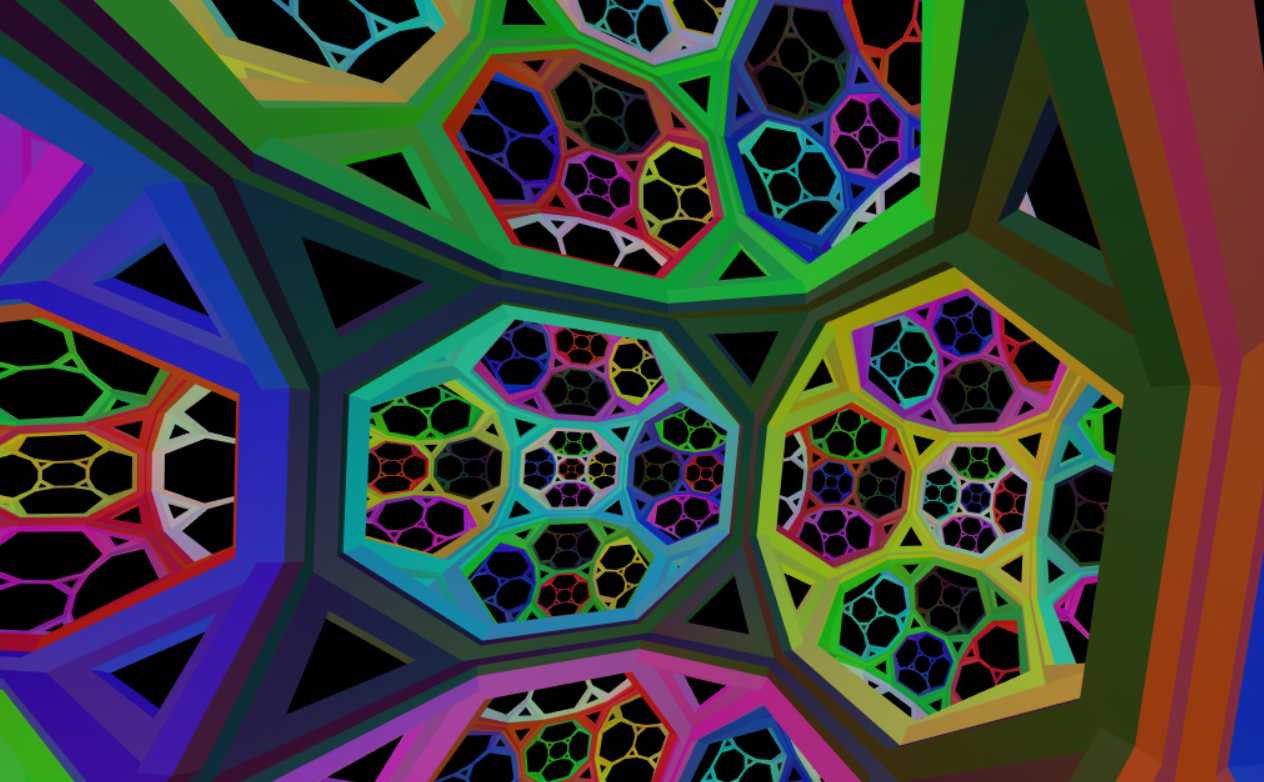
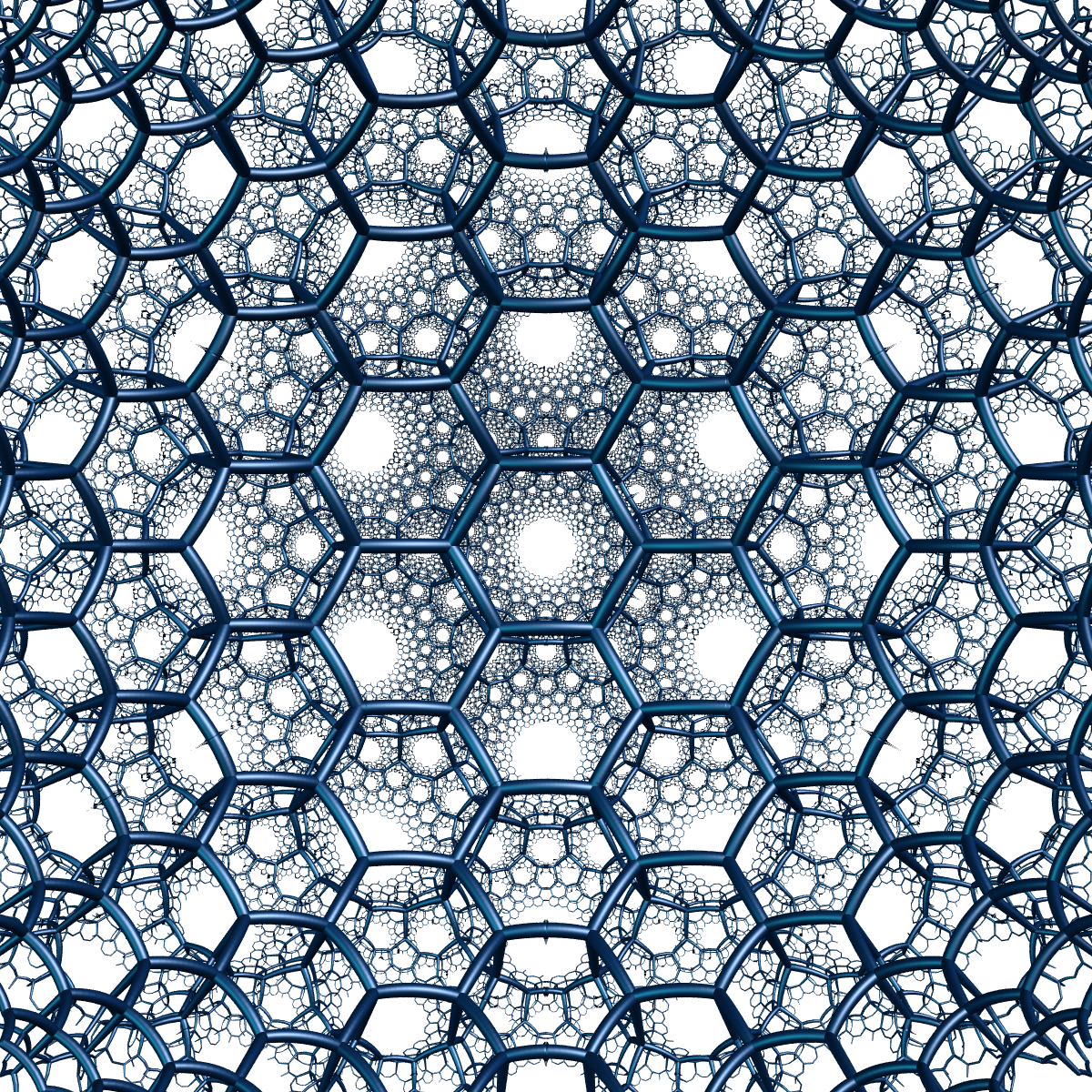
Don’t get all hyperbolic on me now.
Vladimir Bulatov,
Shapeways
Joint AMS/MAA meeting
San Diego, January 10, 2018
https://youtu.be/1JmPeZa-QEo
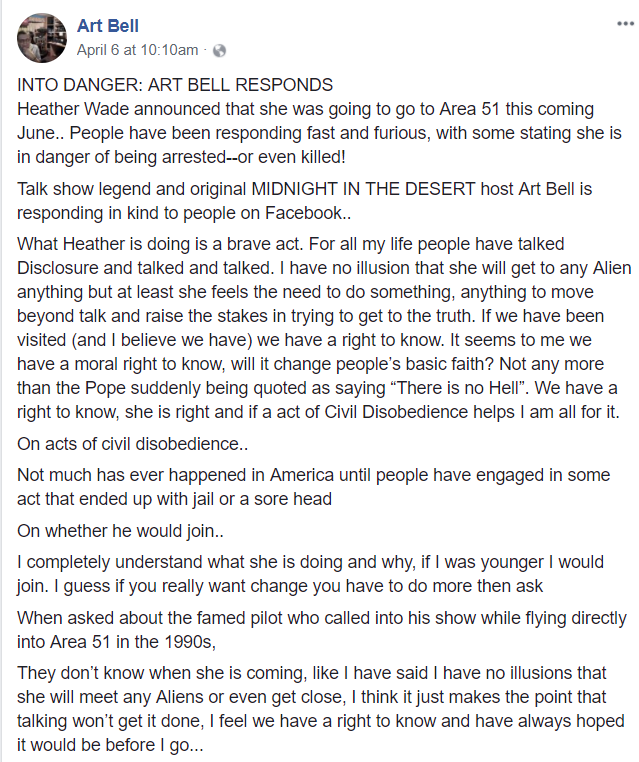
According to the Nye County Sheriff’s Department in Nevada:
“Community Announcement — Long time resident, and radio show host, Art Bell died today at 72 years old in his home in Pahrump Nevada,” the Sheriff’s Department announced on Facebook. “With an estimated 10 million listeners, Bell’s show was at the time of his retirement the most listened-to late-night radio program, and fourth overall,”
Arthur Bell III was born in North Carolina in 1945. “By the age of 13, Art was an FCC licensed radio technician. A few years later, as a young airman, Bell and an equally foolhardy buddy built their own pirate radio station right on Amarillo Air Force base, secretly broadcasing Rock ‘n’ Roll to appreciative locals.
There are those people in your life who you have yet to meet, whose words reached out to you from worn pages of a friend’s book you found as an interesting note on the floor. The words that rang through your Self like the gong of a bell echoing off the rocks of your foundation. So that nothing else will ever sound quite the same. Their printed voice changed the songs you sing and the levels that you hear. Sometimes, in the purest of luck, you get to meet this person. You get to ask them how they are doing today. You get to listen to their voice speak like music playing notes right off the page and you get to sit down and ask them questions. If I were you, or maybe, if you were me… That person would be, Derrick Jensen and this, is the luckiest of days.
“We have a need for enchantment that is as deep and devoted as our need for food and water.”
― Derrick Jensen, The Culture of Make Believe

“Many Indians have told me that the most basic difference between Western and indigenous ways of being is that Westerners view the world as dead, and not as filled with speaking, thinking, feeling subjects as worthy and valuable as themselves.”
― Derrick Jensen
“In order to maintain our way of living, we must tell lies to each other, and especially to ourselves.”
― Derrick Jensen, Endgame, Vol. 1: The Problem of Civilization

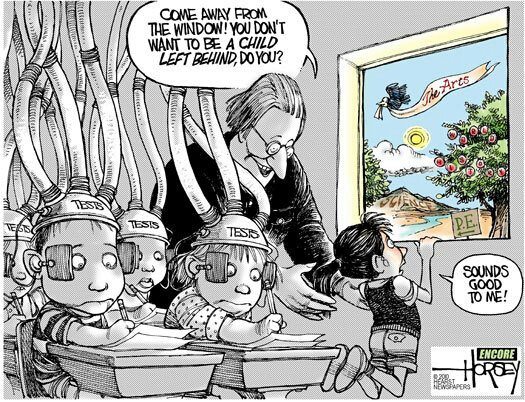
“We were not meant for this. We were meant to live and love and play and work and even hate more simply and directly. It is only through outrageous violence that we come to see this absurdity as normal, or to not see it at all. Each new child has his eyes torn out so he will not see, his ears removed so he will not hear, his tongue ripped out so he will not speak, his mind juiced so he will not think, and his nerves scraped so he will not feel. Then he is released into a world broken in two: others, like himself, and those to be used. He will never realize that he still has all of his senses, if only he will use them. If you mention to him that he still has ears, he will not hear you. If he hears, he will not think. Perhaps most dangerously of all, if he thinks he will not feel. And so on, again.”
― Derrick Jensen, The Culture of Make Believe
“I had broken the most basic commandment of our culture: Thou shalt pretend there is nothing wrong.”
― Derrick Jensen, A Language Older Than Words

“So many indigenous people have said to me that the fundamental difference between Western and indigenous ways of being is that even the most open-minded westerners generally view listening to the natural world as a metaphor, as opposed to the way the world really is. Trees and rocks and rivers really do have things to say to us.”
― Derrick Jensen, What We Leave Behind