Skip to content
Becoming Borealis
Author:
/dj
Posted on
July 29, 2019
July 29, 2019
Brian Eno on Apollo
Posted on
July 27, 2019
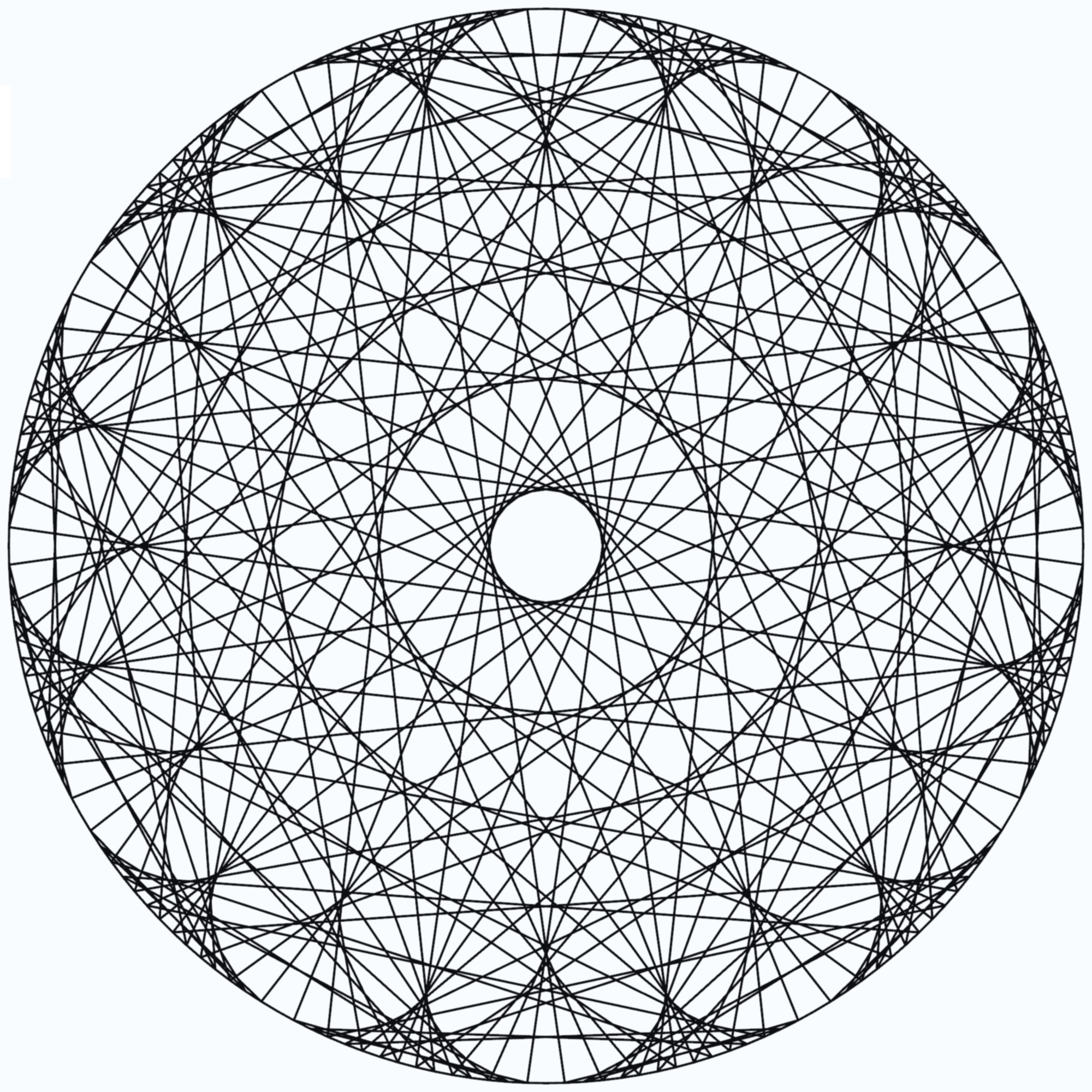
Multiplication Tables – Mod 180
Posted on
July 26, 2019
July 26, 2019
The Process of Building Something
Posted on
July 3, 2019
July 12, 2019
Imagery
Posted on
June 28, 2019
June 28, 2019
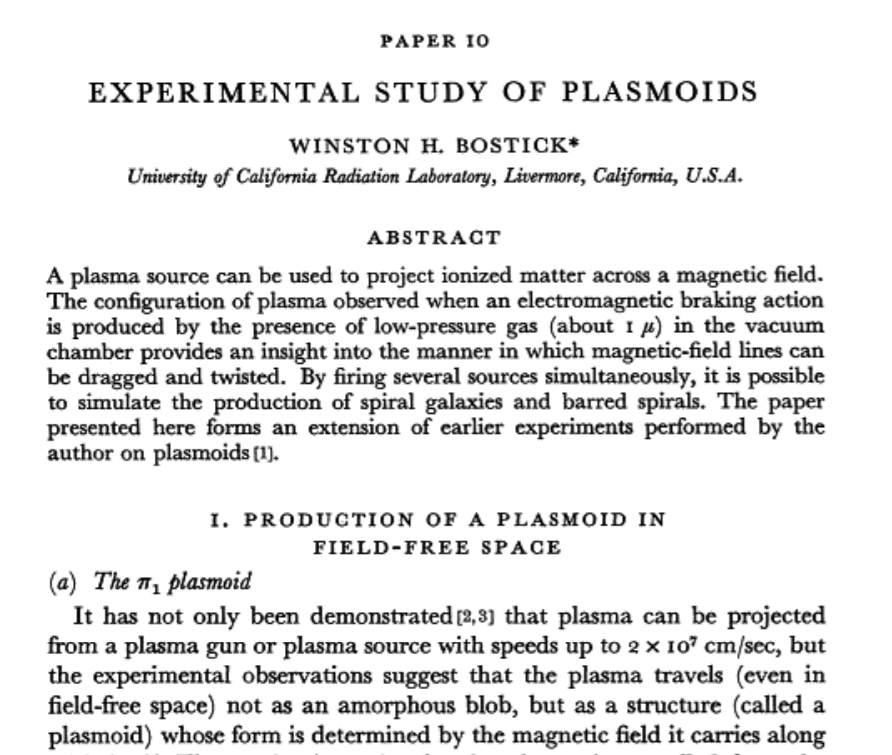
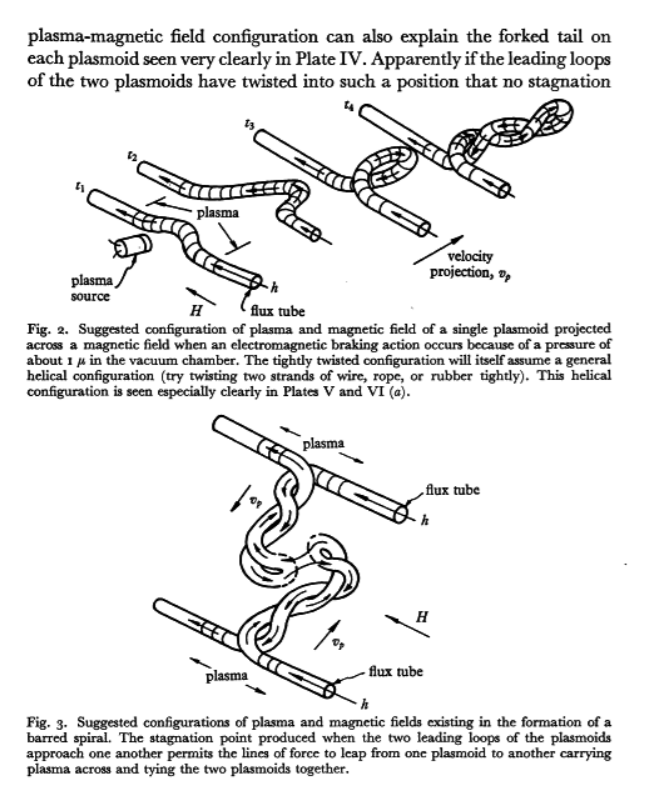
Bostick – Plasmoids
Continue reading
“Bostick – Plasmoids”
Posted on
June 11, 2019
June 18, 2019
Rudolf Steiner – Nature’s Open Secret
Posted on
June 11, 2019
August 24, 2020
RESEARCH IN THE MEASUREMENTS AND THEORY OF PLASMOIDS
Posts navigation
Previous page
Page
1
…
Page
189
Page
190
Page
191
…
Page
237
Next page
Becoming Borealis
Contents – Ideas and Reference
Esoteric Meetup EMU
Mobile Menu
Current Meetup
Torus and Sphere and π and Φ
Decoding the Dance of Space
Arthur Winfree – The Geometry of Biological Time