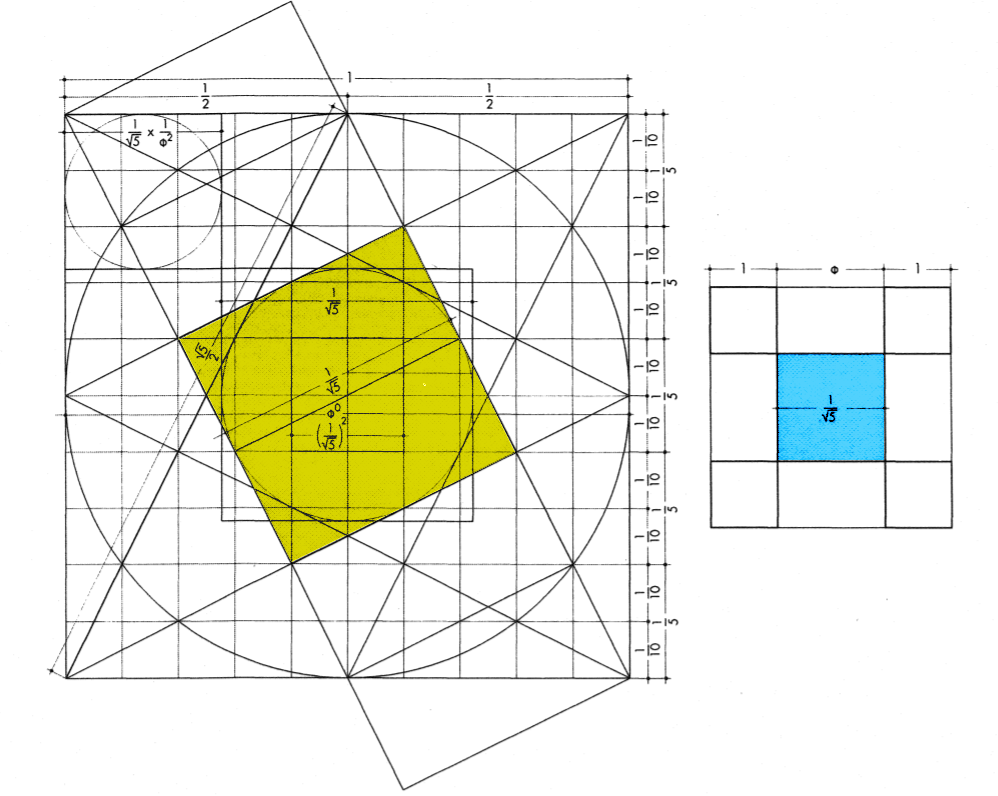
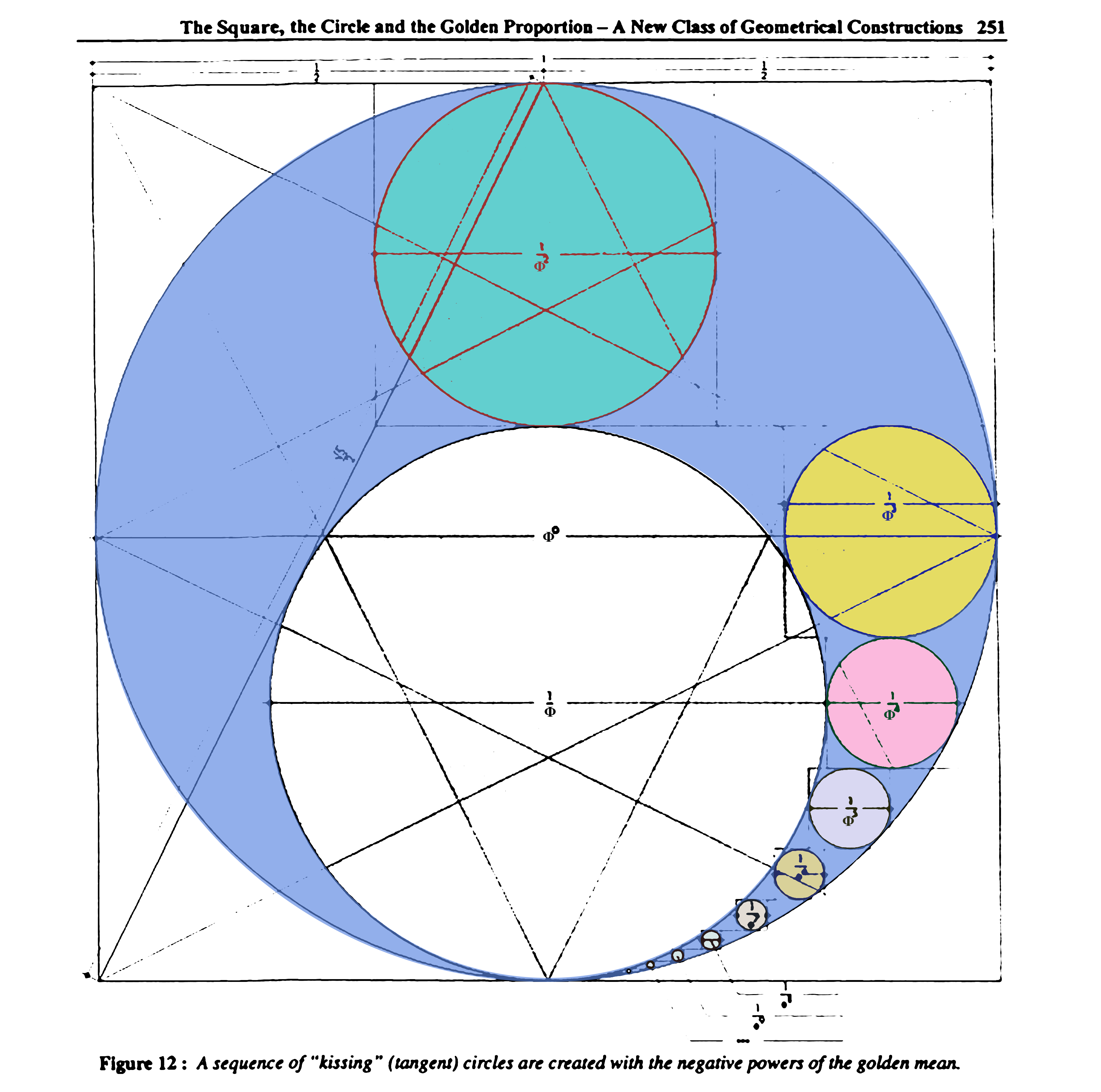
Posted on January 29, 2018January 29, 2018Janusz Kapusta – The Square, the Circle and the Golden Proportion
Posted on January 26, 2018January 26, 2018Francisco Negroni – Volcano Photographer – Lightning – Vortex
Posted on January 26, 2018Tufan Guven – Dan Winter – FractalU – Visual Introduction to Fractal FIELD Science
Posted on January 25, 2018January 28, 2018Rupert Sheldrake – Science & Spiritual Practices https://youtu.be/vBhpfETrRuw?t=7m40s