 The Allegory of the Cave From The Republic of Plato
The Allegory of the Cave From The Republic of Plato
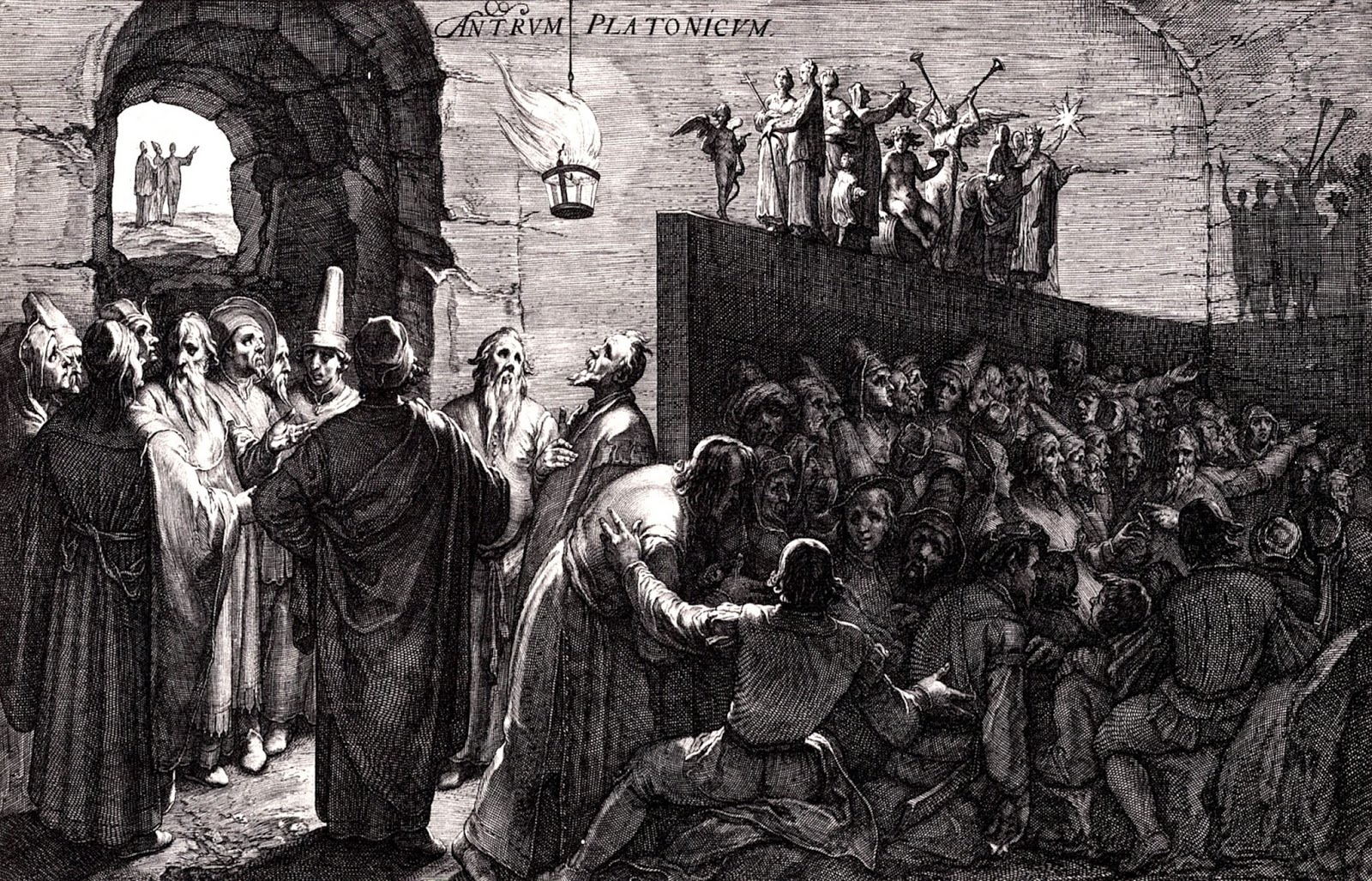
Compare our nature in respect of education and its lack to such an
experience as this. People live under the earth in a cavelike dwelling. Stretching a long way up toward the daylight is its entrance, toward which the entire cave is gathered. The people have been in this dwelling since childhood, shackled by the legs and neck.. Thus they stay in the same place so that there is only one thing for them to look that: whatever they encounter in front of their faces. But because they are shackled, they are unable to turn their heads around.
A fire is behind them, and there is a wall between the fire and the prisoners
Some light, of course, is allowed them, namely from a fire that casts its glow toward them from behind them, being above and at some distance. Between the fire and those who are shackled there runs a walkway at a certain height. Imagine that a low wall has been built the length of the walkway, like the low curtain that puppeteers put up, over which they show their puppets.
The images carried before the fire
So now imagine that all along this low wall people are carrying all sorts of things that reach up higher than the wall: statues and other carvings made of stone or wood and many other artifacts that people have made. As you would expect, some are talking to each other and some are silent.
From the beginning people like this have never managed, whether
on their own or with the help by others, to see anything besides the shadows that are projected on the wall opposite them by the glow of the fire.
Now if they were able to say something about what they saw and to talk it over, do you not think that they would regard that which they saw on the wall as beings?
And now what if this prison also had an echo reverberating off the wall in front of them ? Whenever one of the people walking behind those in chains would make a sound, do you think the prisoners would imagine that the speaker were anyone other than the shadow passing in front of them?
——————————————————————————————–
Artist: Jan Saenredam was born in Zaandam, c. 1565. Orphaned in childhood, he was raised by an uncle, Pieter de Jongh, a bailiff in Assendelft. Though brought up for a life of farm labour and handiwork, he turned to drawing and in time attained some success as a mapmaker. With the help of a local lawyer, he entered the circle of Hendrick Goltzius relatively late in life, in 1589, and worked for short periods with both Goltzius and Jacques de Gheyn II. Saenredam was one of Goltzius’ most important masters and worked closely with him, creating a major body of work. According to both de Bie and Schrevelius, there was some rivalry between each of these masters and Saenredam, who quickly absorbed what they had to offer him. About 1595 Saenredam returned to Assendelft, where he married and where his son Pieter, who later became famous for his paintings of the interiors of churches, was born. He died in Assendelft in 1607.
In Graven Images: The Rise of Professional Printmakers in Antwerp and Haarlem, 1540-1640, ed. Timothy Riggs and Larry Silver (Evanston: Mary and Leigh Block Gallery, Northwestern University, 1993), Riggs describes Saenredam’s “most characteristic engraving style” as “similar to Goltzius’ but more delicate, with silver tones and silky textures,” as exemplified in The Expulsion from Eden after Abraham Bloemaert and The Foolish Virgins (both of which are illustrated in Graven Images and each of which will be found in the pages devoted to Saenredam on our website). Silver, in a chapter on “Goltzius as Evolutionary Reproductive Engraver,” suggests that “the most important engraver after Goltzius was Jan Saenredam. . . . Saenredam began as Goltzius’ apprentice and produced his first engravings in 1589 but he soon left after Goltzius criticism to work with his fellow apprentice de Gheyn in Amsterdam for a couple of years. He then set up his own production shop for prints after Goltzius and other, younger designers, especially Bloemaert. . . . Saenredam followed the Goltzius lead in making prints after similar designers: Polidoro da Caravaggio, Cornelis van Haarlem, and an elaborate variant of his own on Goltzius’ beached whale. Saenredam, too, promoted the Lucas van Leyden revival in his prints. He made engravings in 1600 after two surviving Lucas drawings: Jael and Judith. . . . ” Silver points out that Saenredam’s work after Goltzius (B. 40-103) extended for almost a full decade, and frequently included cycles, particularly allegories of The Four Seasons, The Times of Day [see under Allegories], The Five Senses, The Seven Planets, and even The Three Kinds of Marriage [see under Allegories]. In addition, Saenredam also frequently produced images of mythic deities after Goltzius, sometimes with an emblematic or allegorical message.